






 Markus Esser
Markus Esser
Lesen Sie in dieser Zusammenfassung von Release Notes bis zur Version 2022.01, was sich in der Entwicklung der Roboter-Software bisher getan hat.
Version 2022.01
- Globale Funktionen sind nun verfügbar
- Setzen von unterschiedlichen TCP-Gewichten während des Programmablaufes möglich
- Genauere Einstellung des TCP-Gewichts möglich
- Das lineare Anfahren von Wegpunkten ist nun möglich
- Die Geschwindigkeiten kann mithilfe des Tools überwacht werden
- Textuelle Funktionalität, um Offsets eines TCPs zu ermitteln
- Ein/Ausblenden der 3D-Welt
Version 2021.10
- Erweiterung der Ein- und Ausgänge: Benennung und Konfiguration möglich
- Funktionen lassen sich unabhängig vom Programm abspielen
- Beim Palettieren kann die Orientierung der An- und Abfahrpunkte nun interpoliert werden
Version 2021.07
- Die neue Aktion „Bereich prüfen“ ermöglicht das Einrichten einer Grundstellungsfahrt
- Kalibrieren eines Quaders im textuellen Programmieren
- Grafische Funktionen wurden um Parameter und Rückgabewerte erweitert
- Im Menü „Freies Fahren“ wird ein verbesserter Pfadplaner verwendet
Version 2021.04
- Komplexe Pfade wurden im textuellen Programmieren eingebaut, z.B. Kreise und Splines
- Die Funktion „Reduzierte Geschwindigkeit“ wurde ergänzt
- Das Übertragen von Roboterdaten und Senden von Backups an horstCOSMOS ist jetzt möglich
- Grafische Funktionen wurden um Übergabeparameter erweitert
- Werte können während einer Bewegung in horstFX-Register geschrieben werden
- Das Bremsverhalten des Roboters wurde verbessert
Version 2021.01
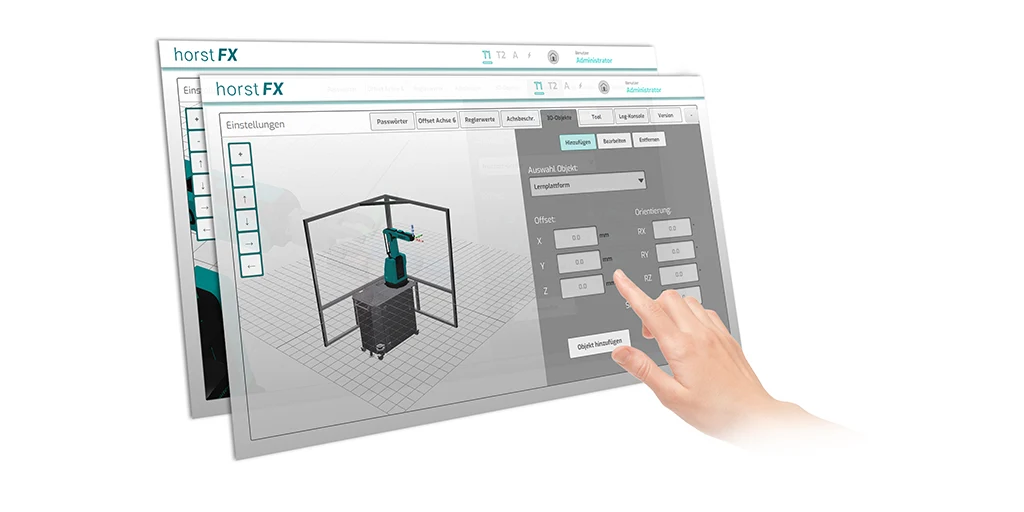
- Komplette Überarbeitung der Erstellung von Tools und 3D-Objekten
- 3D-Welten können erstellt und in Programmen hinterlegt werden
- Die Multi-Tool-Verwendung (z.B. Doppelgreifer) ist jetzt möglich
- Variablen können in- und dekrementiert werden (hoch- und herunterzählen von Variablen)
Version 2020.10
- Die Einbindung externer Schnittstellen wurde erweitert: Profinet, Modbus, XML-RPC
- Erweiterung der Standard-3D-Objekte und Tools
- Die Optimierung des Einregelverhaltens führt zu besseren Taktzeiten
Version 2020.09
- Das neue Menü „Bestimmte Pose anfahren“ ist in der Manuellen Steuerung und im Freien Fahren verfügbar
- Neue Aktion „Relative Wegpunkte“ wurde hinzugefügt
- Verwendung von Variablen im grafischen Programmier-Modus
- Caching von Move-Intervallen führt zu einer Verbesserung der Taktzeit
- Überarbeitung des Textuellen Programmierens (Überarbeitung der Anzeige, neue Einfüge-Buttons, Ausführen von markierten Zeilen,…)
Version 2020.06
- Einführung von Englisch als weitere Sprache
- Der Benutzer kann definierte Achsbegrenzungen individuell festlegen
- Verwendung des Kommunikationsprotokolls Modbus möglich
Version 2020.03
- Verwendung von Funktionen im grafischen Programmier-Modus
- Die Benutzerverwaltung ermöglicht die Vergabe unterschiedlicher Berechtigungen
- Die Verfahr-Geschwindigkeit kann anhand der Traglast angepasst werden