






 Patrick Enderle
Patrick Enderle

Eines der wichtigsten Themen für die Arbeit mit Robotern in der Industrie ist die Sicherheit. Die Vorgaben für Aufbau und Betrieb dienen in erster Linie dem Schutz der Mitarbeitenden. Entsprechend dürfen Industrieroboter, moderne Digital Robots oder Cobots nur unter Berücksichtigung fester Vorgaben und Normen eingesetzt werden.
Jedes Unternehmen, das Maschinen einsetzt, hat wohl schon einmal mit der Maschinenrichtlinie 2006/42/EG zu tun gehabt. Sie gibt vor, welche Vorgaben zur Unfallverhütung für fertige (oder unfertige) Maschinen eingehalten werden müssen, wenn diese innerhalb des Europäischen Wirtschaftsraums (EWR) eingesetzt werden. Somit gilt die Richtlinie auch für die verschiedenen Robotertypen in der Industrie.
Schon der Umfang einer Informationsbroschüre der Deutschen Gesetzlichen Unfallversicherungen (DGUV) – insgesamt umfasst sie 80 Seiten – zeigt, wie wichtig und komplex die Umsetzung dieser EU-Richtlinie für Unternehmen ist. Dabei ist zu beachten, dass es sich bei den Informationen der DGUV lediglich um eine – nicht gesetzlich oder normativ weisende – freie Zusammenfassung der EG-Maschinenrichtlinie handelt. Sachverständige für die Risikobeurteilung von industriellen Robotern weisen deshalb Unternehmen zurecht darauf hin, dass sie sich an der Maschinenrichtlinie und ISO-Normen orientieren sollten.
Industrieroboter, Digital Robot, Cobot: Sicherheit steht immer an erster Stelle
Bei herkömmlichen Industrierobotern ist die Relevanz von Sicherheitsfragen auf den ersten Blick ersichtlich: Die riesigen Maschinen, die man beispielsweise aus der Automobilbranche kennt, strahlen durch ihre Masse und Größe ein gewisses Gefahrenpotenzial aus. Doch Automatisierung entwickelt sich rasant weiter und steht dank kleineren, günstigeren und flexibleren Robotern inzwischen Unternehmen jeder Größe und Branche offen.
Zusätzlich in den Blickpunkt geraten ist das Thema Sicherheit durch das Aufkommen der Kollaborativen Roboter (Cobots). Hier sollen schließlich Mensch und Roboter direkt mit- und nebeneinander arbeiten – ohne trennende oder nicht-trennende Schutzvorrichtungen. Um Verletzungsrisiken so gering wie möglich zu halten, herrschen bei Cobots deshalb besonders strenge Vorgaben für die Begrenzung der Leistung, Geschwindigkeit und Kraft im kollaborativen Betrieb. Ansonsten müssten auch für einen Cobot Schutzvorrichtungen angebracht werden.
Die innovativen Digital Robots, die als Fusion aus leistungsstarker Hard- und innovativer Software plus Industrial Internet-of-Things-Plattform die Automatisierung bereichern, werden rechtlich und normativ dagegen als Industrieroboter behandelt.
Warum ist Sicherheit in der Robotik besonders wichtig?
Anders als herkömmliche Maschinen bewegen sich Roboter frei im Raum. Zuvor programmierte Arbeitsbereiche lassen sich für Menschen viel schwieriger abschätzen als beispielsweise bei einer Presse, die fest installiert ist und innerhalb eines definierten Bereichs arbeitet. Außerdem können leistungsstarke Roboter hohe Geschwindigkeiten erreichen. Auch die auf Traglasten im zweistelligen Kilogramm-Bereich ausgelegten Digital Robots verfügen über eine von außen schwer absehbare Kraft.
Ein vermeintlich ausgeschalteter Roboter kann sich plötzlich aus einer Warteposition bewegen, wenn er die Fortsetzung eines Prozesses signalisiert bekommt. Nicht richtig angebrachte Werkzeuge oder Werkstücke können durch Bewegungen umhergeschleudert werden oder herunterfallen. Oberstes Sicherheitsziel ist es daher, Personen (zum Beispiel durch Zäune, verriegelte Türen oder nicht-trennende Schutzelemente wie Lichtschranken) am Betreten des Arbeitsbereichs des Robotersystems zu hindern.
Wie ist die Rechtslage in Deutschland und der EU?
Geregelt wird dies durch Gesetze und Normen. Während die bereits erwähnte Maschinenrichtlinie RL 2006/42/EG die verbindliche Rechtsgrundlage darstellt, helfen ISO-Normen mit ausführlichen Beschreibungen, diese Rechtsgrundlage zu erfüllen. In Deutschland wird die 2006 von der EU verabschiedete Maschinenrichtlinie im Produktsicherheitsgesetz (ProdSG) und der Maschinenverordnung (9. ProdSV) umgesetzt. In Österreich ist dies die Maschinen-Sicherheitsverordnung 2010. Die Schweiz richtet sich mit der Verordnung über die Sicherheit von Maschinen ebenfalls nach der EU-Richtlinie.
Die wichtigste Sicherheitsnorm für die Industrierobotik ist die ISO 10218, die in zwei Teilen Anforderungen an Roboterhersteller sowie Anlagenbauer und Integratoren für das vollständige Robotersystem beschreibt. Sie verweist wiederum auf Dutzende weitere Normen zur Erfüllung der Sicherheit. Darunter zum Beispiel ISO 13875 (für Sicherheitsabstände und -zäune) sowie ISO 13855 (für berührungslose Schutzeinrichtungen wie Laserscanner).
Für Cobots gilt darüber hinaus die technische Spezifikation ISO TS 15066. Sie beschreibt detailliert, welche Vorgaben für das kollaborative Arbeiten zu erfüllen sind. Sie geht sehr weit ins Detail und gibt zum Beispiel in einer Schmerzschwellentabelle Grenzwerte für fast 30 Körperzonen von Kopf bis Fuß an, wobei Kontaktmöglichkeiten auf Kopfhöhe auszuschließen sind. Sichergestellt werden muss für das Arbeiten im Cobot-Modus laut ISO TS 15066 auch, dass die Kontaktfläche risikofrei ist (Vermeidung von scharfen oder spitzen Bereichen und Kanten) und ausreichend Umhüllungen und/oder Polster vorhanden sind.
Wie funktioniert die Risikobewertung für ein Robotersystem?
Für Unternehmen ist es bei der Beurteilung der Sicherheit wichtig, dass sie ihre Automatisierungsanwendung als Einheit verstehen. Nur dann ist absolut sicheres Arbeiten möglich. Zur Anwendung gehören neben dem eigentlichen Roboter auch alle weiteren Komponenten, also Werkzeuge wie Greifer, die Peripherie und Schutzeinrichtungen. Auch die Arbeitsumgebung und Werkstücke müssen für eine Risikobeurteilung eingehend betrachtet werden.
Ein Robotersystem kann erst dann betrieben werden, wenn die in den ISO-Normen beschriebenen Vorgaben der EG-Maschinenrichtlinie gewährleistet sind. Maschinenbetreiber sind schließlich dafür verantwortlich, dass eine Gefährdung von Personen vermieden wird.
Möglichkeiten zur Validierung und Verifizierung eines Roboters nach ISO 12018-2
- Sichtprüfung
- Praktische Prüfungen
- Messungen
- Beobachtung während des Betriebs
- Prüfung von anwendungsspezifischen Schemata, Schaltplänen und Konstruktionsdokumenten
- Prüfung der sicherheitsbezogenen Anwendungs-Software und/oder Software-Dokumentation
- Überprüfung der aufgabenbasierten Risikobeurteilung
- Prüfung der Anordnungszeichnungen und Dokumente
- Überprüfung von Spezifikationen und Benutzerinformation
Der Vorteil für Betriebe, denen die Zeit oder Erfahrung fehlt, um sich im Dschungel aus Richtlinien und Normen zurechtzufinden: Verlässliche Roboterhersteller beraten sie erstens unverbindlich vor dem Kauf und prüfen die gewünschte Anwendung auf sichere Umsetzbarkeit. Zweitens informieren sie in der Bedienungsanleitung über die Bedeutung der EG-Konformitätserklärung und CE-Kennzeichnung. Dieses wichtige Zeichen weist nach, dass sämtliche sicherheitsrelevante Anforderungen der Maschinenrichtlinie erfüllt sind und der Anwendende das Robotersystem betreiben kann. Kompetente Roboter-Anbieter unterstützen Unternehmen drittens dabei, diese Anforderungen zu erfüllen.
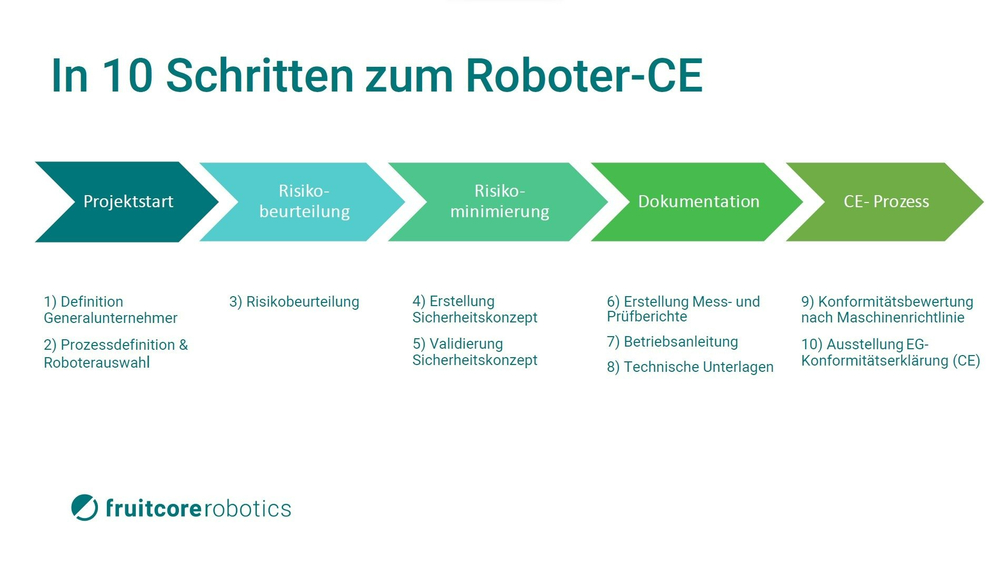
Zudem gibt es am Robotermarkt bereits CE-konforme Schnellstartsysteme in unterschiedlichen Ausführungen, mit denen in der vorgesehenen Art und Weise sofort gearbeitet werden kann.
Welche Schutzmaßnahmen umfasst ein Digital Robot von Haus aus?
Bereits mit der Lieferung des Industrieroboters halten Anwendende wichtige Schutzmaßnahmen in den Händen. Wesentlicher Bestandteil ist ein extern steuerbares Bedienpanel, über das ein Roboter von außerhalb seines Arbeitsbereichs gesteuert werden kann. Diese Bedienpanels verfügen zum einen über einen Not-Halt-, zum anderen über mehrstufige Zustimmtaster zur Programmierung. Wird dieser aus Schreck oder Unachtsamkeit nicht in der vorgesehenen Position gehalten – bei drei Stufen zum Beispiel in der Mittelstellung – würde der Roboter sofort anhalten.
Eine Sicherheitssteuerung erweitert den Schutz. Sie hält sicherheitsrelevante Funktionen des Robotersystems auch im Fall einer Störung aufrecht. Während bei einigen Roboterherstellern die Sicherheitssteuerung zur Verbindung mit externen Maschinen und/oder Komponenten zusätzlich benötigt wird, schaffen es andere, die sichere Kommunikation in die auf Performance Level d ausgerichtete Robotersteuerung zu integrieren.
Weitere Sicherheitsgeräte – zum Beispiel Laserscanner oder Lichtschranken – könnten damit direkt über das Robotersystem eingebunden und konfiguriert werden. Ein echter Vorteil für automatisierende Unternehmen, weil die Sicherheitsgeräte dann erstens schnell eingesetzt werden können und die Mitarbeitenden sich zweitens keine Kenntnisse über eine weitere Steuerung aneignen müssen.
Wie wird ein Roboter sicher programmiert und betrieben
Um die Einrichtung oder Überprüfung eines neuen Programms risikofrei zu gestalten, verfügen Industrieroboter über mehrere Betriebsarten. Je nach Hersteller kann diese über Schlüssel oder Schalter eingestellt werden. Im manuellen Teach-Modus muss beispielsweise ein Zustimmtaster gedrückt gehalten werden, auch ist die Geschwindigkeit während der Programmierung abgesenkt.
Erst wenn der gesamte Schutzbereich abgesichert ist, darf ein industrieller Roboter im Automatikbetrieb arbeiten. Der Start des Automatik-Modus muss von außerhalb des geschützten Bereichs erfolgen. Betritt eine Person diesen, löst ein Sicherheitshalt aus.
Wann gelten Arbeitsbereiche von Industrierobotern als abgesichert?
Um Menschen am ungewollten Betreten des Roboter-Arbeitsbereichs zu hindern, sind trennende Schutzeinrichtungen eine naheliegende Lösung. Beispiele hierfür sind abgeschlossene Roboterzellen und/oder Gitterzäune. In der Praxis haben sich für Roboter mit niedrigeren Traglasten, zum Beispiel also auch für Digital Robots, Scheiben aus Polycarbonat bewährt.
Auch per nicht-trennender Schutzeinrichtung lässt sich die Absicherung gewährleisten, etwa durch Laserscanner. Weil Menschen in diesen Bereich eintreten können, muss ein Sicherheitsabstand gewährleistet sein. Er stellt sicher, dass die Anlage stillsteht bevor die Person die möglicherweise gefährdende Stellen in der Anlage erreicht.
Hier kommt die bereits erwähnte ISO-Norm 13855 zum Tragen, mit deren Hilfe Anwendende den Sicherheitsabstand berechnen können. Die Formel richtet sich nach der Annäherungsgeschwindigkeit eines Menschen (K) und wird multipliziert mit der gesamten Nachlaufzeit des Systems bis zum Halt in Sekunden (T). Addiert wird dieser Wert mit dem Eindringabstand eines Körperteils (C) in Millimetern. Also: K x T + C
Wie herrscht Sicherheit außerhalb des Roboterbetriebs?
Es gibt also eine ganze Reihe an Maßnahmen, damit Sie die leicht in die Produktion integrierbaren und flexibel einsetzbaren Digital Robots sicher nutzen können. Der Vorteil dieser innovativen Industrieroboter: Sie lassen sich sehr einfach aufbauen und in Betrieb nehmen – von Mitarbeitenden mit einer entsprechenden technischen und elektronischen Ausbildung. Ihnen und/oder ihren Vorgesetzten obliegt auch, das Kollegium über den Stand der Installation zu informieren und regelmäßige Risikobeurteilungen durchzuführen.