Find the robot
that fits your needs
Discover the ideal industrial robot for your specific needs.

HORST600 G2

Range
Range is not included in
Maximum payload
Maximum payload is not included in
Repeatability
Repeatability is not included in
Maximum Speed (TCP)
Maximum Speed (TCP) is not included in
Axis
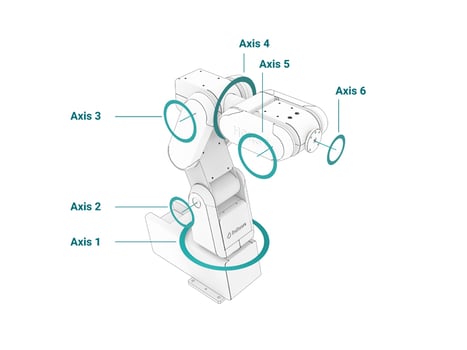
Axis is not included in
Weight
Weight is not included in
Ambient temperature
Ambient temperature is not included in
Sound level
Sound level is not included in
Protection class
Protection class is not included in
Power Supply
Power Supply is not included in
Digital inputs on tool flange
Digital inputs on tool flange is not included in
Digital outputs on tool flange
Digital outputs on tool flange is not included in
I/O power supply on tool flange
I/O power supply on tool flange is not included in
Dimensions Control (L x W x H)
Dimensions Control (L x W x H) is not included in
Digital inputs on switch cabinet
Digital inputs on switch cabinet is not included in
I/O power supply on switch cabinet
I/O power supply on switch cabinet is not included in
Safety-relevant Inputs (2 channels each)
Safety-relevant Inputs (2 channels each) is not included in
Cabling between robot and controller
Cabling between robot and controller is not included in
Digital outputs on switch cabinet
Digital outputs on switch cabinet is not included in
Safety-relevant Outputs (2 channels each)
Safety-relevant Outputs (2 channels each) is not included in
Dimensions Panel (L x W x H)
Dimensions Panel (L x W x H) is not included in
Display specification
Display specification is not included in
Safety-relevant emergency stop
Safety-relevant emergency stop is not included in
Wiring between panel and control
Wiring between panel and control is not included in
Safety-relevant three-level enabling switch
Safety-relevant three-level enabling switch is not included in
Graphical programming on the panel

Access to licence management and Updates (horstCOSMOS)

Access to data management for backups
Access to mobile Internet (optional)
Textual robot programming with JavaScript

Manual control of the robot with a digital twin

Extended safety functions

Recording process data

Weight based waypoint speed optimization

Maximum robot speed, accuracy and performance
Setting up a workspace limitation

Contact via online service system
Simulation of robot applications on operator panel

Communication with periphery via TCP/IP
HORST800 G2

Range
Range is not included in
Maximum payload
Maximum payload is not included in
Repeatability
Repeatability is not included in
Maximum Speed (TCP)
Maximum Speed (TCP) is not included in
Axis
Axis is not included in
Weight
Weight is not included in
Ambient temperature
Ambient temperature is not included in
Sound level
Sound level is not included in
Protection class
Protection class is not included in
Power Supply
Power Supply is not included in
Digital inputs on tool flange
Digital inputs on tool flange is not included in
Digital outputs on tool flange
Digital outputs on tool flange is not included in
I/O power supply on tool flange
I/O power supply on tool flange is not included in
Dimensions Control (L x W x H)
Dimensions Control (L x W x H) is not included in
Digital inputs on switch cabinet
Digital inputs on switch cabinet is not included in
I/O power supply on switch cabinet
I/O power supply on switch cabinet is not included in
Safety-relevant Inputs (2 channels each)
Safety-relevant Inputs (2 channels each) is not included in
Cabling between robot and controller
Cabling between robot and controller is not included in
Digital outputs on switch cabinet
Digital outputs on switch cabinet is not included in
Safety-relevant Outputs (2 channels each)
Safety-relevant Outputs (2 channels each) is not included in
Dimensions Panel (L x W x H)
Dimensions Panel (L x W x H) is not included in
Display specification
Display specification is not included in
Safety-relevant emergency stop
Safety-relevant emergency stop is not included in
Wiring between panel and control
Wiring between panel and control is not included in
Safety-relevant three-level enabling switch
Safety-relevant three-level enabling switch is not included in
Graphical programming on the panel
Access to licence management and Updates (horstCOSMOS)
Access to data management for backups
Access to mobile Internet (optional)
Textual robot programming with JavaScript
Manual control of the robot with a digital twin
Extended safety functions
Recording process data
Weight based waypoint speed optimization
Maximum robot speed, accuracy and performance
Setting up a workspace limitation
Contact via online service system
Simulation of robot applications on operator panel
Communication with periphery via TCP/IP
HORST1500 G2

Range
Range is not included in
Maximum payload
Maximum payload is not included in
Repeatability
Repeatability is not included in
Maximum Speed (TCP)
Maximum Speed (TCP) is not included in
Axis
Axis is not included in
Weight
Weight is not included in
Ambient temperature
Ambient temperature is not included in
Sound level
Sound level is not included in
Protection class
Protection class is not included in
Power Supply
Power Supply is not included in
Digital inputs on tool flange
Digital inputs on tool flange is not included in
Digital outputs on tool flange
Digital outputs on tool flange is not included in
I/O power supply on tool flange
I/O power supply on tool flange is not included in
Dimensions Control (L x W x H)
Dimensions Control (L x W x H) is not included in
Digital inputs on switch cabinet
Digital inputs on switch cabinet is not included in
I/O power supply on switch cabinet
I/O power supply on switch cabinet is not included in
Safety-relevant Inputs (2 channels each)
Safety-relevant Inputs (2 channels each) is not included in
Cabling between robot and controller
Cabling between robot and controller is not included in
Digital outputs on switch cabinet
Digital outputs on switch cabinet is not included in
Safety-relevant Outputs (2 channels each)
Safety-relevant Outputs (2 channels each) is not included in
Dimensions Panel (L x W x H)
Dimensions Panel (L x W x H) is not included in
Display specification
Display specification is not included in
Safety-relevant emergency stop
Safety-relevant emergency stop is not included in
Wiring between panel and control
Wiring between panel and control is not included in
Safety-relevant three-level enabling switch
Safety-relevant three-level enabling switch is not included in
Graphical programming on the panel
Access to licence management and Updates (horstCOSMOS)
Access to data management for backups
Access to mobile Internet (optional)
Textual robot programming with JavaScript
Manual control of the robot with a digital twin
Extended safety functions
Recording process data
Weight based waypoint speed optimization
Maximum robot speed, accuracy and performance
Setting up a workspace limitation
Contact via online service system
Simulation of robot applications on operator panel
Communication with periphery via TCP/IP
Range
Range is not included in
Range is not included in
Range is not included in
Maximum payload
Maximum payload is not included in
Maximum payload is not included in
Maximum payload is not included in
Repeatability
Repeatability is not included in
Repeatability is not included in
Repeatability is not included in
Maximum Speed (TCP)
Maximum Speed (TCP) is not included in
Maximum Speed (TCP) is not included in
Maximum Speed (TCP) is not included in
Axis
Axis is not included in
Axis is not included in
Axis is not included in
Weight
Weight is not included in
Weight is not included in
Weight is not included in
Ambient temperature
Ambient temperature is not included in
Ambient temperature is not included in
Ambient temperature is not included in
Sound level
Sound level is not included in
Sound level is not included in
Sound level is not included in
Protection class
Protection class is not included in
Protection class is not included in
Protection class is not included in
Power Supply
Power Supply is not included in
Power Supply is not included in
Power Supply is not included in
Digital inputs on tool flange
Digital inputs on tool flange is not included in
Digital inputs on tool flange is not included in
Digital inputs on tool flange is not included in
Digital outputs on tool flange
Digital outputs on tool flange is not included in
Digital outputs on tool flange is not included in
Digital outputs on tool flange is not included in
I/O power supply on tool flange
I/O power supply on tool flange is not included in
I/O power supply on tool flange is not included in
I/O power supply on tool flange is not included in
Dimensions Control (L x W x H)
Dimensions Control (L x W x H) is not included in
Dimensions Control (L x W x H) is not included in
Dimensions Control (L x W x H) is not included in
Digital inputs on switch cabinet
Digital inputs on switch cabinet is not included in
Digital inputs on switch cabinet is not included in
Digital inputs on switch cabinet is not included in
I/O power supply on switch cabinet
I/O power supply on switch cabinet is not included in
I/O power supply on switch cabinet is not included in
I/O power supply on switch cabinet is not included in
Safety-relevant Inputs (2 channels each)
Safety-relevant Inputs (2 channels each) is not included in
Safety-relevant Inputs (2 channels each) is not included in
Safety-relevant Inputs (2 channels each) is not included in
Cabling between robot and controller
Cabling between robot and controller is not included in
Cabling between robot and controller is not included in
Cabling between robot and controller is not included in
Digital outputs on switch cabinet
Digital outputs on switch cabinet is not included in
Digital outputs on switch cabinet is not included in
Digital outputs on switch cabinet is not included in
Safety-relevant Outputs (2 channels each)
Safety-relevant Outputs (2 channels each) is not included in
Safety-relevant Outputs (2 channels each) is not included in
Safety-relevant Outputs (2 channels each) is not included in
Dimensions Panel (L x W x H)
Dimensions Panel (L x W x H) is not included in
Dimensions Panel (L x W x H) is not included in
Dimensions Panel (L x W x H) is not included in
Display specification
Display specification is not included in
Display specification is not included in
Display specification is not included in
Safety-relevant emergency stop
Safety-relevant emergency stop is not included in
Safety-relevant emergency stop is not included in
Safety-relevant emergency stop is not included in
Wiring between panel and control
Wiring between panel and control is not included in
Wiring between panel and control is not included in
Wiring between panel and control is not included in
Safety-relevant three-level enabling switch
Safety-relevant three-level enabling switch is not included in
Safety-relevant three-level enabling switch is not included in
Safety-relevant three-level enabling switch is not included in
Graphical programming on the panel
Access to licence management and Updates (horstCOSMOS)
Access to data management for backups
Access to mobile Internet (optional)
Textual robot programming with JavaScript
Manual control of the robot with a digital twin
Extended safety functions
Recording process data
Weight based waypoint speed optimization
Maximum robot speed, accuracy and performance
Setting up a workspace limitation
Contact via online service system
Simulation of robot applications on operator panel
Communication with periphery via TCP/IP
Adv. Graphical Features

Graphical programming of palletizing applications

Graphical programming of palletizing applications is included in
Graphical robot programming of complex paths

Graphical robot programming of complex paths is included in
User-defined operating view with makro buttons

User-defined operating view with makro buttons is included in
User-defined coordinate systems

User-defined coordinate systems is included in
Access to the Profinet interface

Access to the Profinet interface is not included in
Access to the modbus interface

Access to the modbus interface is not included in
Primary interface for external function calls (via XML-RPC)

Primary interface for external function calls (via XML-RPC) is not included in
Component Management

Component Management is not included in
Process Control

Process Control is not included in
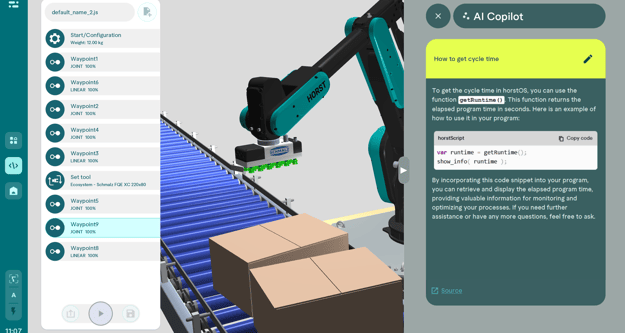
AI Copilot

AI Copilot is not included in
AI Programming
AI Programming is not included in
AI Error Handling
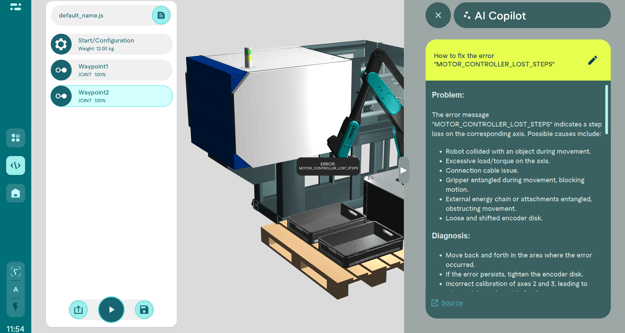
AI Error Handling is not included in
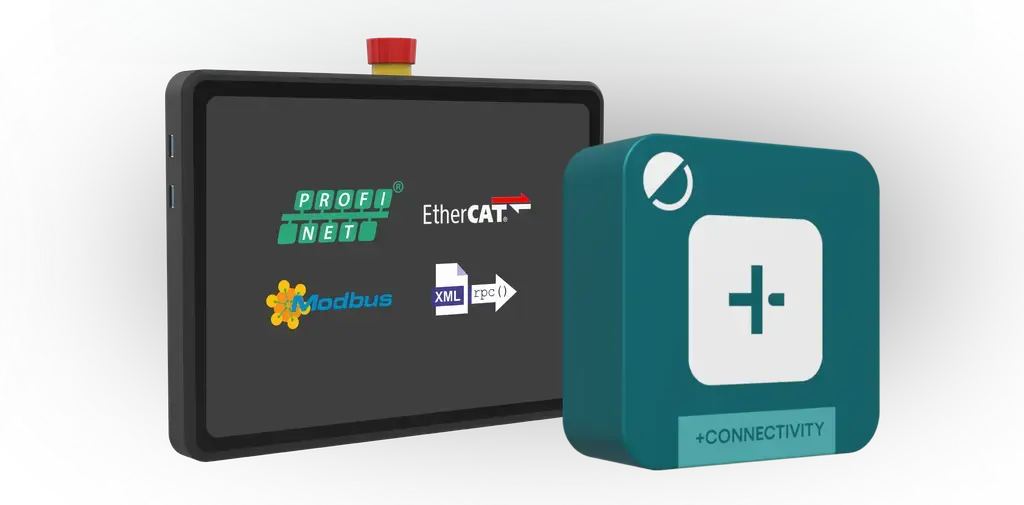
Advanced Interfaces
Graphical programming of palletizing applications
Graphical programming of palletizing applications is not included in
Graphical robot programming of complex paths
Graphical robot programming of complex paths is not included in
User-defined operating view with makro buttons
User-defined operating view with makro buttons is not included in
User-defined coordinate systems
User-defined coordinate systems is not included in
Access to the Profinet interface
Access to the Profinet interface is included in
Access to the modbus interface
Access to the modbus interface is included in
Primary interface for external function calls (via XML-RPC)
Primary interface for external function calls (via XML-RPC) is included in
Component Management
Component Management is not included in
Process Control
Process Control is not included in
AI Copilot
AI Copilot is not included in
AI Programming
AI Programming is not included in
AI Error Handling
AI Error Handling is not included in
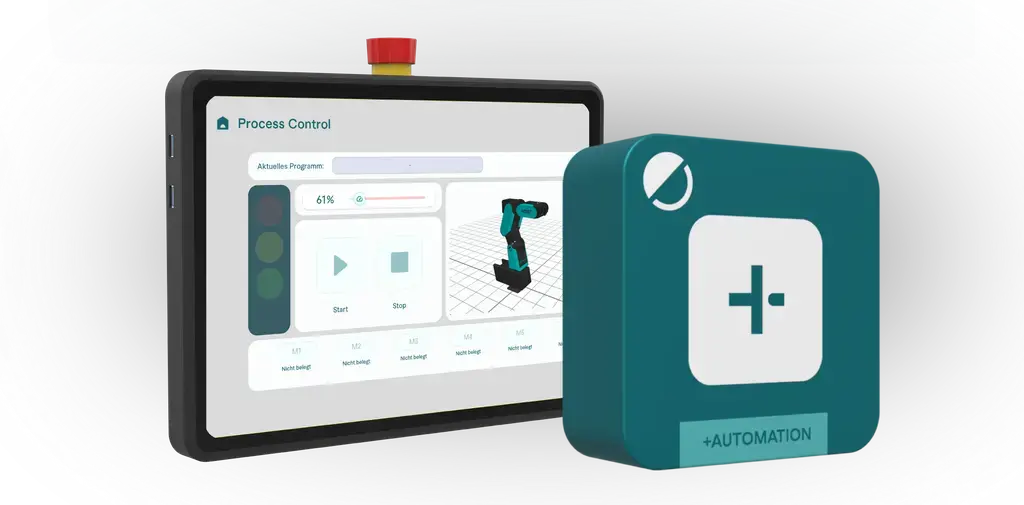
Adv. Automation Features
Graphical programming of palletizing applications
Graphical programming of palletizing applications is not included in
Graphical robot programming of complex paths
Graphical robot programming of complex paths is not included in
User-defined operating view with makro buttons
User-defined operating view with makro buttons is not included in
User-defined coordinate systems
User-defined coordinate systems is not included in
Access to the Profinet interface
Access to the Profinet interface is not included in
Access to the modbus interface
Access to the modbus interface is not included in
Primary interface for external function calls (via XML-RPC)
Primary interface for external function calls (via XML-RPC) is not included in
Component Management
Component Management is included in
Process Control
Process Control is included in
AI Copilot
AI Copilot is not included in
AI Programming
AI Programming is not included in
AI Error Handling
AI Error Handling is not included in
AI Features

Graphical programming of palletizing applications
Graphical programming of palletizing applications is not included in
Graphical robot programming of complex paths
Graphical robot programming of complex paths is not included in
User-defined operating view with makro buttons
User-defined operating view with makro buttons is not included in
User-defined coordinate systems
User-defined coordinate systems is not included in
Access to the Profinet interface
Access to the Profinet interface is not included in
Access to the modbus interface
Access to the modbus interface is not included in
Primary interface for external function calls (via XML-RPC)
Primary interface for external function calls (via XML-RPC) is not included in
Component Management
Component Management is not included in
Process Control
Process Control is not included in
AI Copilot
AI Copilot is included in
AI Programming
AI Programming is included in
AI Error Handling
AI Error Handling is included in
Graphical programming of palletizing applications
Graphical programming of palletizing applications is included in
Graphical programming of palletizing applications is not included in
Graphical programming of palletizing applications is not included in
Graphical programming of palletizing applications is not included in
Graphical robot programming of complex paths
Graphical robot programming of complex paths is included in
Graphical robot programming of complex paths is not included in
Graphical robot programming of complex paths is not included in
Graphical robot programming of complex paths is not included in
User-defined operating view with makro buttons
User-defined operating view with makro buttons is included in
User-defined operating view with makro buttons is not included in
User-defined operating view with makro buttons is not included in
User-defined operating view with makro buttons is not included in
User-defined coordinate systems
User-defined coordinate systems is included in
User-defined coordinate systems is not included in
User-defined coordinate systems is not included in
User-defined coordinate systems is not included in
Access to the Profinet interface
Access to the Profinet interface is not included in
Access to the Profinet interface is included in
Access to the Profinet interface is not included in
Access to the Profinet interface is not included in
Access to the modbus interface
Access to the modbus interface is not included in
Access to the modbus interface is included in
Access to the modbus interface is not included in
Access to the modbus interface is not included in
Primary interface for external function calls (via XML-RPC)
Primary interface for external function calls (via XML-RPC) is not included in
Primary interface for external function calls (via XML-RPC) is included in
Primary interface for external function calls (via XML-RPC) is not included in
Primary interface for external function calls (via XML-RPC) is not included in
Component Management
Component Management is not included in
Component Management is not included in
Component Management is included in
Component Management is not included in
Process Control
Process Control is not included in
Process Control is not included in
Process Control is included in
Process Control is not included in
AI Copilot
AI Copilot is not included in
AI Copilot is not included in
AI Copilot is not included in
AI Copilot is included in
AI Programming
AI Programming is not included in
AI Programming is not included in
AI Programming is not included in
AI Programming is included in
AI Error Handling
AI Error Handling is not included in
AI Error Handling is not included in
AI Error Handling is not included in
AI Error Handling is included in
Software Updates

Access to the latest software releases
Access to the latest software releases is included in
Service-hotline
Service-hotline is not included in
Technical advice from robot experts
Technical advice from robot experts is not included in
Wear warranty
Wear warranty is not included in
System check (remote or on-site)
System check (remote or on-site) is not included in
Extended warranty for entire robot system
Extended warranty for entire robot system is not included in
Spare parts flat rate and –delivery
Spare parts flat rate and –delivery is not included in
Servicevertrag Care

Access to the latest software releases
Access to the latest software releases is included in
Service-hotline
Service-hotline is included in
Technical advice from robot experts
Technical advice from robot experts is included in
Wear warranty
Wear warranty is included in
System check (remote or on-site)
System check (remote or on-site) is included in
Extended warranty for entire robot system
Extended warranty for entire robot system is not included in
Spare parts flat rate and –delivery
Spare parts flat rate and –delivery is not included in
Servicevertrag Care Plus

Access to the latest software releases
Access to the latest software releases is included in
Service-hotline
Service-hotline is included in
Technical advice from robot experts
Technical advice from robot experts is included in
Wear warranty
Wear warranty is included in
System check (remote or on-site)
System check (remote or on-site) is included in
Extended warranty for entire robot system
Extended warranty for entire robot system is included in
Spare parts flat rate and –delivery
Spare parts flat rate and –delivery is included in
Academy Plus

horstOS Simulation